| AutoFEM Analysis Contact | |||||||
| AutoFEM Analysis Contact | |||||||
Contacto
Para definir un contacto, utilice el comando:
Linea de comando: |
_FEMA CONTACTO |
Menú principal: |
AutoFEM | Cargas/Restricciones | Contacto |
Icono: |
|
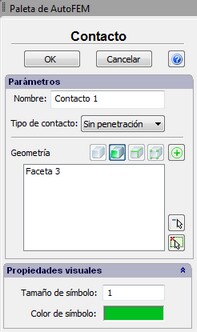
Se necesitan Contacto restricciones en los estudios de cuerpos en contacto. Para definir un contacto, es necesario seleccionar las caras de contacto de dos cuerpos. A continuación, seleccione uno de los cuatro tipos de contactos:
| • | Condiciones de servidumbre; |
| • | Libre (sin contacto); |
| • | Sin penetración; |
| • | Pared virtual. |
El tipo de contacto Unido se utiliza en el caso en que es necesario para unir las superficies de contacto de los cuerpos. Los cuerpos se consideran en condiciones de servidumbre, en este caso, por lo que las deslocalizaciones de una cara en uno de los resultados del cuerpo en las reubicaciones de otra institución enfrenta sin ninguna restricción. Si los cuerpos están hechos de materiales con diferentes características físicas, entonces el modelo de elementos finitos representa correctamente para las diferentes propiedades de los materiales de diferentes caras de cuerpos en contacto.
Si el área de contacto no está sometido a ninguna restricción, a continuación, utilizar el tipo libre. En este caso, las superficies de contacto se pueden mover libremente con respecto a la otra. Por lo tanto, al utilizar este contacto, hay que estar en guardia contra la penetración mutua de poner en contacto las caras cuando se aplica una carga.
El contacto sin penetración difiere de contacto gratuito, ya que prohibe la penetración mutua de las caras de contacto. Este tipo de contacto permite modelado tales fenómenos físicos como el deslizamiento de un cuerpo a lo largo de otra, la aparición de lagunas en los lugares de conexión parte debido a la deformación, etc nos gustaría señalar también que el uso del contacto sin penetración implica la existencia de un contacto físico entre cuerpo se enfrenta en el estado inicial de la estructura que se está analizando.
Pared virtual es un objeto firme imaginario a través del cual no puede penetrar en contacto con la cara del modelo. Pared virtual se utiliza para modelar un contacto de un cuerpo con una superficie rígida, cuya deformación se puede despreciar para los propósitos de modelado. En este caso, todo lo que es necesario es definir las caras del primer cuerpo que están en contacto la pared virtual. Se da a entender que en contacto con las caras " muro virtual " del modelo se puede deslizar en su avión.
Es posible configurar los contactos predeterminados.
Linea de comando: |
_FEMADEFCONT |
Menú principal: |
AutoFEM | Cargas/Restricciones | Conjunto predeterminado de tipo de contacto |
Icono: |
|
Este comando define el tipo de contacto para utilizar de forma predeterminada. Esto sirve para definir los parámetros globales de contacto para todos los cuerpos en contacto. Por ejemplo, si se está calculando una estructura combinada, que consta de varias partes conectadas rígidamente, a continuación, que definen el contacto predeterminado como "servicial" ayuda a evitar establecer de forma manual el tipo de contacto para todas las superficies en contacto. Parámetros de contacto por defecto pueden ser redefinidos con la ayuda del «contacto» de comandos.
La dependencia de un modelo de comportamiento en varios tipos de contacto se puede ilustrar con el siguiente ejemplo. Dos vigas se mantienen juntos mediante un sistema de retención de contacto, con un extremo fijo, y una fuerza distribuida actuando normal sobre las superficies superior y laterales de la primera viga.
|
Modelo inicial. |
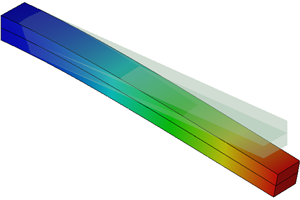
Si se utiliza el tipo de contacto "Unido", entonces el haz combinado se deforma como un único sólido.
|
Tipo de contacto « Unido » |
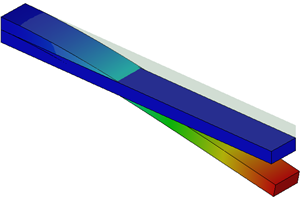
En el caso cuando se utiliza el contacto "sin penetración", uno puede ver que la viga superior hace que el inferior deformado y al mismo tiempo se desliza a lo largo de ella.
|
Tipo de contacto « Sin penetración » |
Cuando se utiliza el contacto "libre", se puede observar la penetración de la viga superior en el inferior, que se evitó en el diseño de modelos de ensamblaje.
|
Tipo de contacto « Libre » |
|
Tipo de contacto « Muro virtual » |
Una orden típica de pasos para definir las restricciones de contacto es la siguiente:
1. Iniciar el comando « Contacto » ![]() .
.
2. Seleccionar contacto con las caras del primer cuerpo.
3. Seleccione contactando caras del segundo cuerpo.
4. Definir el tipo de contacto.
5. Completar el comando.
Ver también: Fijación.