| AutoFEM Analysis Contact | |||||||
| AutoFEM Analysis Contact | |||||||
Contatto
Per definire un contatto, utilizzare il comando:
Command Line: |
_FEMACONTACT |
Main Menu: |
AutoFEM | Carichi/Restrizioni | Contatto |
Icon: |
|
I vincoli di contatto sono necessari per lo studio del contatto tra corpi.
Per definire un contatto, è necessario selezionare le facce a contatto dei due corpi selezionando uno dei quattro tipi di contatto:
| • | vincolato; |
| • | libero (no contatti); |
| • | no penetrazione; |
| • | muro virtuale . |

Il tipo di contatto "vincolato" viene utilizzato nel caso in cui sia necessario legare le superfici di contatto dei corpi. I corpi sono considerati come leganti in questo caso, in modo che le deformazioni di una faccia in uno risultino nella deformazioni nel corpo dell'altro senza alcuna restrizione sulle facce. Se i corpi sono fatti di materiali con differenti caratteristiche fisiche, allora il modello ad elementi finiti rappresenta correttamente per le diverse proprietà dei materiali delle diverse facce dei corpi a contatto.
Se l'area di contatto non è sottoposta ad alcun vincolo, quindi utilizzare il tipo "libero". In questo caso, le superfici di contatto possono muoversi liberamente le une rispetto alle altre. Pertanto, quando si utilizza questo contatto, ci potrebbe essere una reciproca penetrazione delle facce di contatto quando viene applicato un carico.
Il contatto "no penetrazione" differisce dal contatto "libero" in quanto vieta la penetrazione reciproca delle facce di contatto. Questo tipo di contatto permette la modellazione di tali fenomeni fisici come scorrimento di un corpo lungo un altro, la presenza di lacune nei punti di connessione parte a causa di deformazione, ecc. Vorremmo anche notare che il contatto "no penetrazione" implica l'esistenza di un contatto fisico tra facce del corpo nello stato iniziale della struttura oggetto di analisi.
Il "muro virtuale" è un oggetto fermo immaginario attraverso il quale non può essere penetrare quando entra in contatto con la faccia del modello. Il "muro virtuale" è usato per modellare un contatto di un corpo con una superficie rigida, la cui deformazione può essere trascurata ai fini di modellazione. In questo caso, tutto ciò che è necessario è quello di definire le facce del primo corpo a contatto con il muro virtuale. È implicito che a contatto con le facce il "muro virtuale" del modello può scivolare sul loro piano.
E 'possibile impostare i contatti predefiniti.
Command Line: |
_FEMADEFCONT |
Main Menu: |
AutoFEM | Carichi/Restrizioni | Contatto predefinita... |
Icon: |
|
Questo comando definisce il tipo di contatto da utilizzare per impostazione predefinita. Questo serve a definire i parametri di contatto globali per tutti i corpi a contatto. Ad esempio, se una struttura combinata, la quale è costituita da diverse parti rigidamente collegate, viene calcolata definendo quindi il contatto predefinito come "legante" cipossiamo evitare la definizione manuale del tipo a contatto per tutte le superfici a contatto. I parametri di contatto di default possono essere ridefiniti con l'aiuto del comando «Contatto».
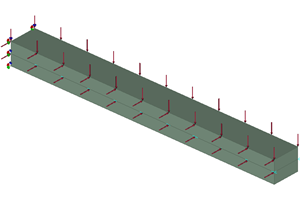
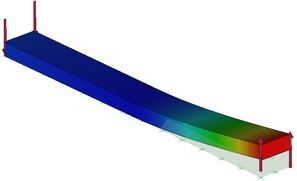
La dipendenza di un modello di comportamento su vari tipi di contatto può essere illustrata con il seguente esempio. Due fasci sono tenuti insieme mediante un sistema di ritenuta contatto, con una estremità fissa, ed una forza che agisce distribuita normalmente sulle superfici superiori e laterali della prima trave.
|
modello iniziale |
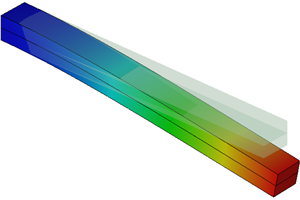
Se viene utilizzato il tipo di contatto "vincolato", allora il raggio composto è formato come un unico solido.
|
Tipo di contatto «vincolato» |
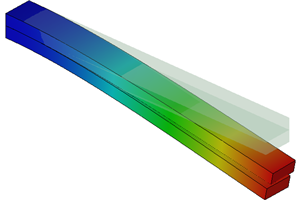
Nel caso in cui viene utilizzato il contatto "no penetrazione", si può vedere che la lama superiore differisce da quella inferiore lungo di essa.
|
Tipo di contatto «no penetrazione» |
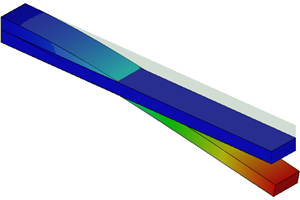
Quando si utilizza il contatto "libero", si può osservare la penetrazione del fascio superiore in quello inferiore, quest'opzione deve essere evitato durante la progettazione di modelli di montaggio.
|
Tipo di contatto «libero» |
|
Tipo di contatto «muro virtuale» |
Un tipico ordine di passaggi per definire le restrizioni di contatto è il seguente:
1. Avviare il comando «Contatto» ![]() .
.
2. Selezionare facce di contatto del primo corpo.
3. Selezionare contattando facce del secondo corpo.
4. Definire il tipo di contatto.
5. Completare il comando.
Vedere anche: Fissaggio.