| AutoFEM Analysis Remote Mass | |||||||
| AutoFEM Analysis Remote Mass | |||||||
The command permits transmission of mass-and-inertia effects of a structural member to the system with-out creating finite-element mesh and a model for such elements. For example, to transmit mass-and-inertia effects of an electric motor to a load-carrying structure. It is evident that if a problem is set to assess strength or dynamics of a load-carrying structure (bracket support), it is not reasonable nor always possible to construct a full-featured finite-element model of such a complex device as an electric motor. In this case, for the purpose of calculation it is enough to determine the location of a centre of mass and the relevant mass-and-inertia parameters of the electric motor which will impact on the load-carrying structure.
Use this command to define a remote mass to represent one or more components that are suppressed or not defined in your geometric model. The location of the remote mass should be at the centre of gravity (CG) of the un-modelled components. The mass moments of inertia are calculated with respect to a coordinate system that is centred at the CG, and has X-Y-Z axes parallel to user defined coordinate system.
The program provides an automatic way to treat a component as a remote mass.
To set the additional mass, the following items are used:
Command Line: |
_FEMAREMMASS |
Main Menu: |
AutoFEM | Loads/Restraints | Remote Mass |
Icon: |
|
Defining Remote Mass
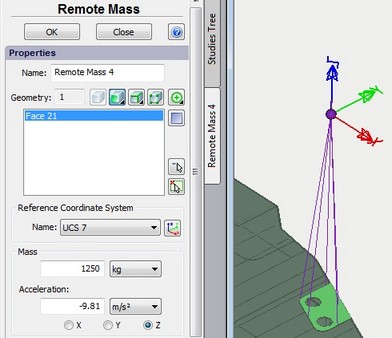
The typical sequence of steps at the setting of the remote mass:
1.Create a reference coordinate system in the point of a remote mass centre of gravity.
2.Initiate the command “Remote mass” .
3.Choose the reference coordinate system.
4.Select facets, ribs or vertices of the body connected with the mass.
5.Set the units and value of the mass.
6.Set the units and value of gravity acceleration.
7.Define the acceleration direction.
8.Complete the command.
See also: Mechanical Loads, Force, Pressure, Hydrostatic Pressure, Centrifugal Force, Gravity, Acceleration, Bearing Load, Torque, Torque at Nodes, Additional Mass, Remote Force, Remote Moment, Remote Mass
See also: Mechanical Loads, Force, Pressure, Hydrostatic Pressure, Centrifugal Force, Gravity, Acceleration, Bearing Load, Torque, Torque at Nodes, Additional Mass, Remote Force / Moment,