| AutoFEM Analysis Contact | |||||||
| AutoFEM Analysis Contact | |||||||
Contact
Pour définir un contact, utilisez la commande:
Commande: |
_FEMACONTACT |
Menu principal: |
AutoFEM | Chargements/Restraints | Contact |
Icône: |
|
Des contraintes de contact sont nécessaires dans les études avec des objets en contact.
Pour définir un contact, vous devez sélectionner les faces de contact des deux corps. Ensuite, sélectionnez l'un des quatre types de contacts:
| • | lien rigide; |
| • | libre (sans contacte); |
| • | sans pénétration; |
| • | mur virtuel. |
Le type de contact lien rigide est utilisé dans le cas où il est nécessaire de lier les surfaces de contact des corps. Les corps sont considérés liés, de sorte que les mouvements d'un objet entraîne un mouvement dans l'autre objet sans aucune restriction.
Si la zone de contact n'est pas soumis à aucune contrainte, puis utilisez le type libre. Dans ce cas, les surfaces de contact peuvent se déplacer librement par rapport à l'autre. Par conséquent, lorsque vous utilisez ce contact, il faut être attentif à ce que aucune pénétration mutuelle des faces de contact quand une charge est appliquée se produise.
Le contact "sans pénétration" diffère du contact libre en ce qu'il interdit la pénétration mutuelle des faces en contact.
Ce type de contact permet de simuler les phénomènes physiques tel le glissement d'un corps le long d'un autre etc. N'oubliez pas que l'utilisation du tape "sans penetration" implique l'existence d'un contact physique entre les corps à l'état initial de l'étude.
Mur virtuel est un objet solide imaginaire non pénétrable. Mur virtuel est utilisé pour modéliser un contact d'un corps avec une surface rigide dont la déformation peut être négligée pour des fins de modélisation. Il est nécessaire de définir les faces du premier corps qui entrent en contact avec le mur virtuel. Il est impliqué que le contact avec mur virtuel permet un glissement le long de la surface.
Il est possible de configurer les contacts standards.
Commande: |
_FEMADEFCONT |
Menu principal: |
AutoFEM | Chargements/Restraints | Contact par défaut |
Icône: |
|
Cette commande définit le type de contact à utiliser par défaut. Cela sert à définir les paramètres de contact globales pour tous les corps en contact. Par exemple, si une structure, qui se compose de plusieurs parties reliées de façon rigide, combinée est calculé et ensuite défini comme contact par défaut "lié", permet d'éviter la définition manuelle du type de contact pour chaque surfaces en contact. Paramètres de contact par défaut peuvent être redéfinies à l'aide de la commande «Contact» .
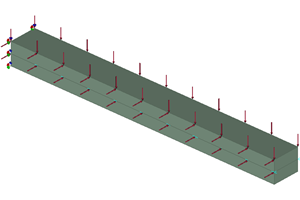
La dépendance du comportement d'un modèle sur différents types de contacts va être illustrée par l'exemple suivant. Deux barres sont maintenus ensemble à l'aide d'un contact, avec une extrémité fixée et une force répartie agissant perpendiculairement sur les surfaces supérieure et latérales de la première barre.
|
Modèle initial |
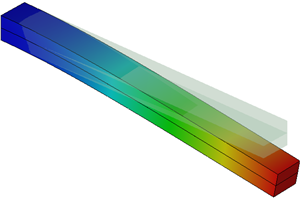
Si le "lien rigide" de contact est utilisé, les barres combinées sont déformées comme une seule barre.
|
type de contact «lien rigide» |
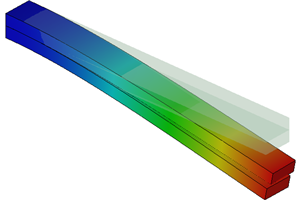
Dans le cas où le contact "sans pénétration" est utilisé, on peut voir que la barre supérieure déforme celle du bas et glisse sur elle en même temps.
|
type de contact «sans pénétration» |
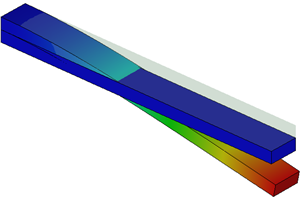
Lorsque vous utilisez le contact "libre", on peut observer la pénétration de la poutre supérieure dans l'inférieure, ceci doit être évité lors de la conception des modèles d'assemblage.
|
type de contact «libre» |
|
type de contact «mur virtuel» |
Une série d'étapes typique pour définir des contraintes de contact sont les suivantes:
1. Initier la commande «Contact» ![]() .
.
2. Sélectionner faces en contact du premier corps.
3. Sélectionner faces de contact du second corps.
4. Définissez le type de contact.
5. Exécutez la commande.
Voir aussi: Fixation.